DTAM 中的 Cost Volume 笔记
DTAM 是比较经典的基于 RGBD 的 SLAM 算法,其中的 Cost Volume 部分也是后续比较常见的模块,这里进行一下记录。
1 定义说明
定义 \(\mathrm{T}_{w c} \in \mathbb{S E}(3)\) 表示从相机坐标系 \(c\) 到世界坐标系 \(w\) 的变换矩阵:
\(
\begin{equation}
\mathrm{T}_{w c}=\left(\begin{array}{cc}
\mathrm{R}_{w c} & \mathbf{t}_w \\
\mathbf{0}^T & 1
\end{array}\right)
\end{equation}
\)
其中 \(\mathrm{R}_{w c} \in \mathbb{SO}(3)\) 表示旋转矩阵, \(\mathbf{t}_w\) 表示平移向量。
则对于空间中一个点具有如下变换关系:
\(
\begin{equation}
\mathbf{x}_w=\mathrm{T}_{w c} \mathbf{x}_c
\end{equation}
\)
以及投影操作:
\(
\begin{equation}
\mathbf{u} = \pi\left(\mathbf{x}_c\right)=(x / z, y / z)^{\top}
\end{equation}
\)
反投影操作:
\(
\begin{equation}
\mathbf{x}=\pi^{-1}(\mathbf{u}, d)
\end{equation}
\)
其中 \(d=\boldsymbol{\xi}(\mathbf{u})\) 表示像素 \(\mathbf{u}\) 对应的逆深度。
则 2D 和 3D 映射关系为:
\(
\begin{equation}
\begin{gathered}
\mathbf{x}=\pi^{-1}(\mathbf{u}, d) \\
\pi^{-1}(\mathbf{u}, d)=\frac{1}{d} \mathrm{K}^{-1} \dot{\mathbf{u}} \\
\dot{\mathbf{u}}=(u, v, 1)^T
\end{gathered}
\end{equation}
\)
2 Cost Volume
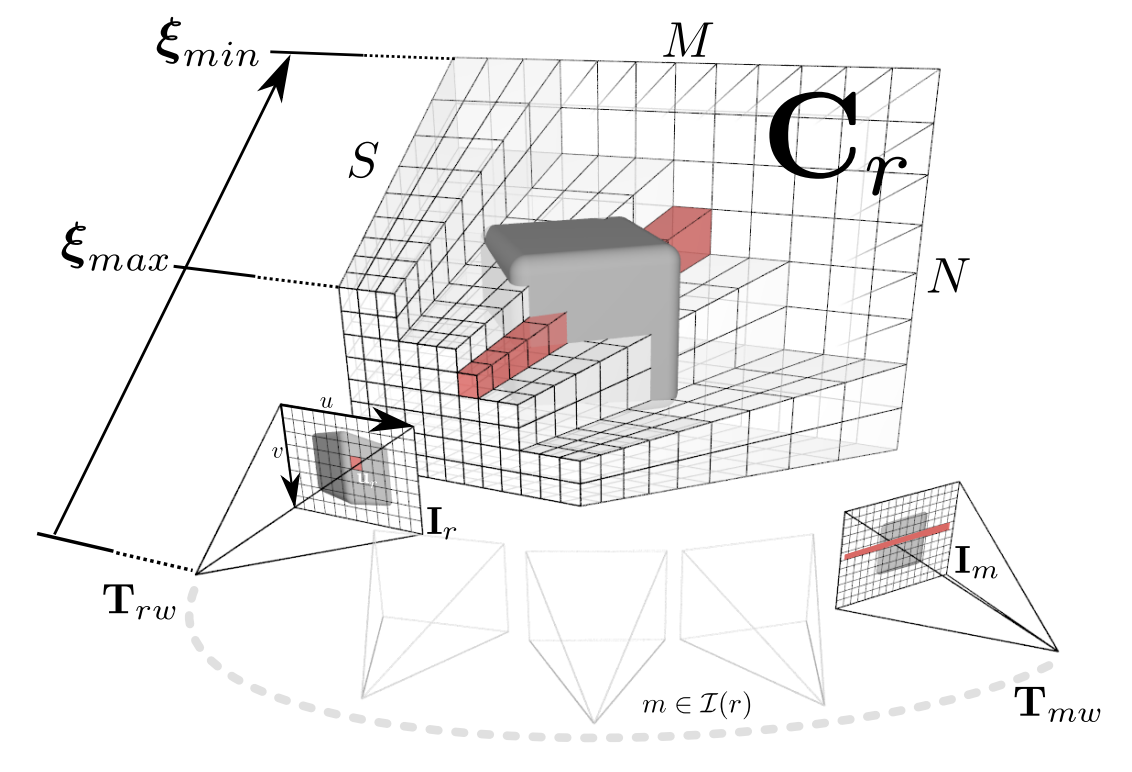
DTAM 中计算 Cost Volume 的方式如上图所示。
对一个关键帧序号 \(r\) ,其对应世界到相机坐标系变换记为 \(\mathrm{T}_{r w}\);逆深度图记为 \(\boldsymbol{\xi}_r: \Omega \rightarrow \mathbb{R}\);RGB 图像记为 \(\mathbf{I}_r: \Omega \rightarrow \mathbb{R}^3\),\(\Omega \subset \mathbb{R}^2\) 为像素坐标集合。
对关键帧 \(\mathbf{I}_r\),其取较短基线(共视区域差异不要太大)的关键帧集合 \(m \in \mathcal{I}(r)\),则我们记它的 Cost Volume 为:
\(
\begin{equation}
\mathbf{C}_r(\mathbf{u}, d)=\frac{1}{|\mathcal{I}(r)|} \sum_{m \in \mathcal{I}(r)}\left\|\rho_r\left(\mathbf{I}_m, \mathbf{u}, d\right)\right\|_1
\end{equation}
\)
其中:
\(
\begin{equation}
\rho_r\left(\mathbf{I}_m, \mathbf{u}, d\right)=\mathbf{I}_r(\mathbf{u})-\mathbf{I}_m\left(\pi\left(\mathrm{KT}_{m r} \pi^{-1}(\mathbf{u}, d)\right)\right)
\end{equation}
\)
根据亮度一致假设,我们优化目标为使得光度误差 \(\rho\) 最小的表面逆深度 \(d\),认为该逆深度对应的表面就是对应的真实物体表面。
参考文献
[1] https://www.semanticscholar.org/paper/DTAM%3A-Dense-tracking-and-mapping-in-real-time-Newcombe-Lovegrove/7633c7470819061477433fdae15c64c8b49a758b