Have a Question?
截断符号距离 | TSDF, Truncated Signed Distance Function
1 定义
TSDF(Truncated Signed Distance Function)是截断符号距离函数的缩写,各个体素的截断符号距离组成了 TSDF 场。理解 TSDF 首先要理解下符号距离 SDF。如下图所示:

假设相机光心到表面的距离为 d_s,到射线上体素 \vec x 距离为 d_v,则符号距离就是 SDF(x) = d_{\vec x}。
显然,当 d_{\vec x} \gt 0 时,表示体素在平面前方,当d_{\vec x} \lt 0 时,表示体素在平面后方。
体素的概率值是我们更新体素距离的方式。因为体素距离平面过远时,其数值对于平面影响过小因此通常都会采用 TSDF 设定一个阈值 \delta 来截断,类似下图:

用公式定义如下:
\begin{equation}\operatorname{TSDF}(x) =\begin{cases}1 & \text{ if } x \gt \delta \\\frac{\operatorname{SDF}(x)}{\left | \delta \right | } & \text{ if } -\delta \le x \le \delta \\-1 & \text{ if } x \lt \delta\end{cases}\end{equation}
如果是在 2D 平面上,一个简单的 TSDF 场类似下面的样子:

2 融合
2.1 权重
有了上述 TSDF 的定义,想要对于多个不同帧的同一个体素观测进行更新,首先要定义体素的概率,考虑到一个显然的事实,对于一个深度传感器来说,测量数据的方差与角度有关:
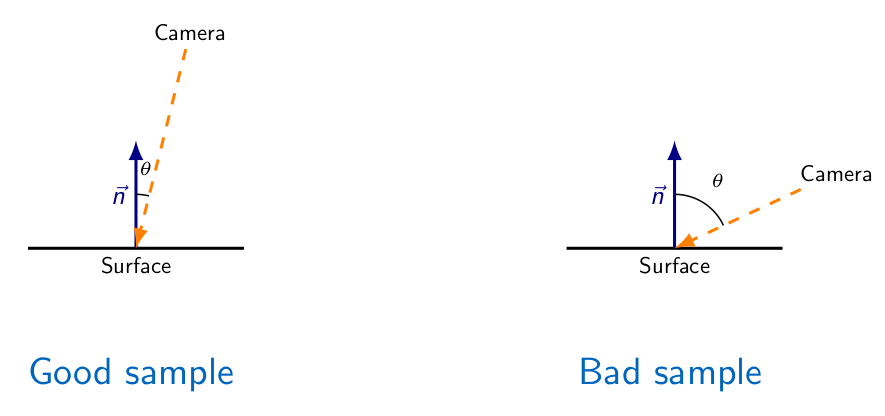
则可以想到一种基本的权重定义如下:
\begin{equation}w(p) = \frac{\operatorname{cos}(\theta)}{\operatorname{distance}(v)}\end{equation}
其中 \operatorname{distance}(v)=d_v。
2.2 更新
对于同一个体素多次不同观测,我们采用如下方式更新:
1)初始化:
\begin{equation}\left\{\begin{matrix}T S D F_{0}(\mathbf{x})=0 \\W_{0}(\mathbf{x})=0\end{matrix}\right.\end{equation}
2)更新 TSDF 和 W 值:
\begin{equation}\begin{aligned}T S D F_{i}(\mathbf{x}) &=\frac{W_{i-1}(\mathbf{x}) T S D F_{i-1}(\mathbf{x})+w_{i}(\mathbf{x}) t s d f_{i}(\mathbf{x})}{W_{i-1}(\mathbf{x})+w_{i}(\mathbf{x})} \\W_{i}(\mathbf{x}) &=W_{i-1}(\mathbf{x})+w_{i}(\mathbf{x})\end{aligned}\end{equation}
其中小写 tsdf 和 w 表示更新之前的观测值(对于相机视野外的情况 w=0 对于是业内的情况 w=1),大写 TSDF 和 W 表示更新之后的值。反复执行上述操作即可将新的帧融合到之前的帧上。
参考文献
[1] https://wlsdzyzl.top/2019/01/25/3D-Reconstruction%E2%80%94%E2%80%94TSDF-volume-reconstruction/
[2] https://www.jianshu.com/p/462fe75753f7
[3] Truncated Signed Distance Function: Experiments on Voxel Size
good