论文笔记:Dynamic Graph CNN for Learning on Point Clouds
DGCNN 是对 PointNet 的改进,PointNet 网络每个点单独提取特征缺乏局部关联。DGCNN 提出了 EdgeConv 就是对它的改进。
1 网络结构
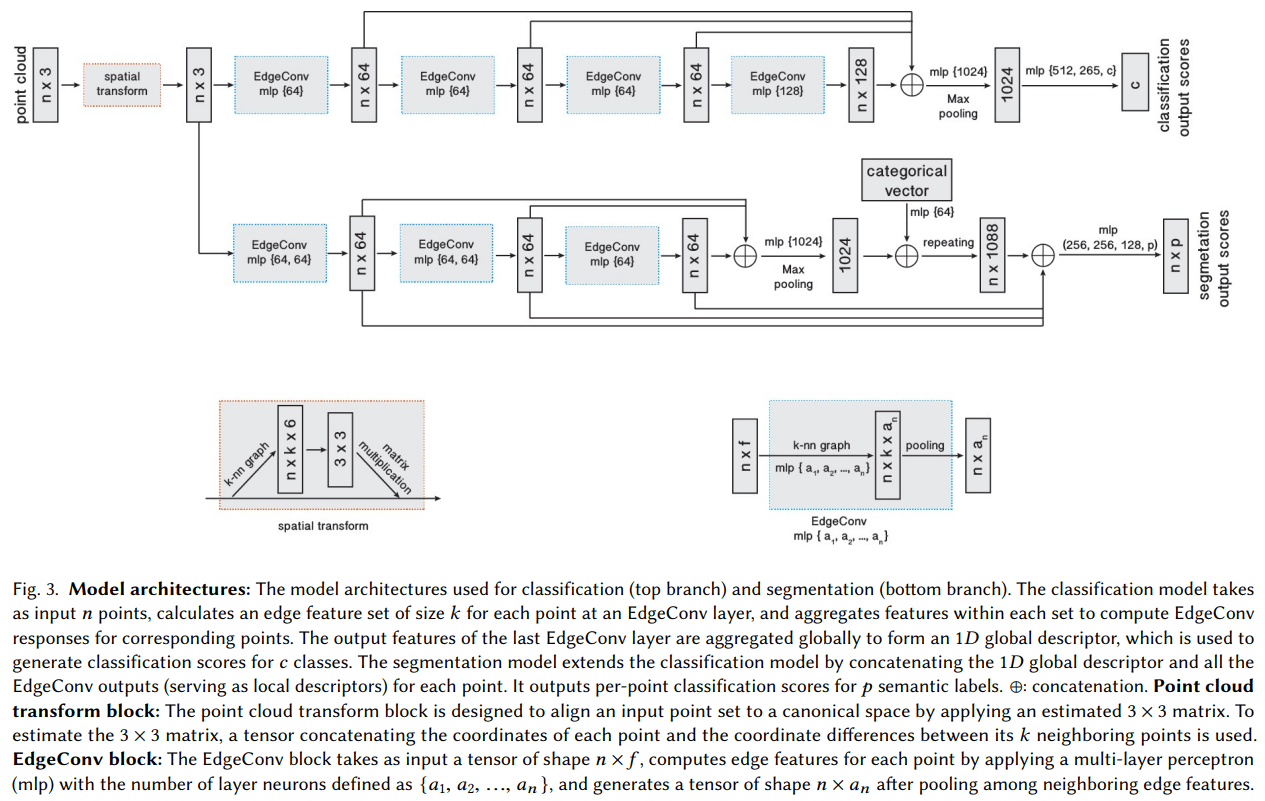
DGCNN 网络结构如下图所示,可以看出其整体架构和 PointNet 是基本一致的,主要区别就是将其中的 MLP 替换成了 EdgeConv。
2 EdgeConv
2.1 EdgeConv 结构
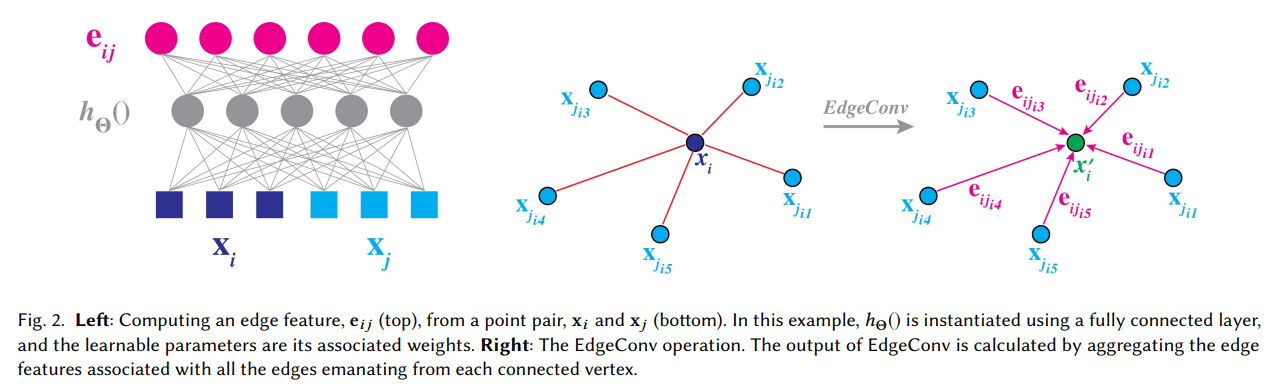
上图是 EdgeConv 的示意图。假设一个F维点云 \(\mathbf{X}=\left\{\mathbf{x}_{1}, \dots, \mathbf{x}_{n}\right\} \subseteq \mathbb{R}^{F}\) 其中 F 表示每个点的维度,最简单的可能是 x, y, z 三维,另外还可能引入每个点颜色、法线等信息。给定一个有向图 \(\mathcal{G}=(\mathcal{V}, \mathcal{E})\) 用来表示点云的局部结构,其中顶点为 \(\mathcal{V}=\{1, \ldots, n\}\),边为 \(\mathcal{E} \subseteq \mathcal{V} \times \mathcal{V}\)。在一个简单例子中,我们用 \(\mathcal{G}\) 表示 k-nearest neighbor (k-NN) 图。针对上图有如下定义:
点和边缘:定义 \(x_i\) 周围最近 k 个点 \(x_{j_{i 1}}, \ldots, x_{j_{i k}}\) ,其有向边为 \(\left(i, j_{i 1}\right), \ldots,\left(i, j_{i k}\right)\)
边缘特征函数:定义边缘特征为 \(e_{i j}=h_{\Theta}\left(x_{i}, x_{j}\right)\),其中 \(h_{\Theta} : \mathbb{R}^{F} \times \mathbb{R}^{F} \rightarrow \mathbb{R}^{F^{\prime}}\) 是一些使用一些可学习的参数 \(\Theta\) 构成的非线性函数。
特征聚合函数:对于边缘特征进行聚合的函数定义为□,其定义是:
上述KNN图中的K值是一个超参,分类网络中K=20,而在分割网络中K=30。
关于公式中的 \(h\) 和 □ 有四种可能的选择:
第一种:认为 \(x_i\) 的特征是周围所有点的加权求和,这一点类似于图像的卷积操作,其中每个卷积核为 \(\theta_{m}\),\(\Theta=\left(\theta_{1}, \ldots, \theta_{M}\right)\) 表示所有卷积核的集合。其公式如下:
\(\begin{aligned}x_{i m}^{\prime}=\sum_{j :(i, j) \in \mathcal{E}} \boldsymbol{\theta}_{m} \cdot \mathbf{x}_{j}\end{aligned}\tag{2}\)
第二种:描述了一种仅考虑全局特征的形式,即只有关注点 \(x_i\)。其公式如下:
\(\begin{aligned}h_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)=h_{\Theta}\left(\mathbf{x}_{i}\right)\end{aligned}\tag{3}\)
第三种:只关注周围特征形式。其公式如下:
\(\begin{aligned}h_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)=h_{\Theta}\left(\mathbf{x}_{j}\right)\end{aligned}\tag{4}\)
其中:
\(\begin{aligned}x_{i m}^{\prime}=\sum_{j \in \mathcal{V}}\left(h_{\boldsymbol{\theta}\left(\mathbf{x}_{j}\right)}\right) g\left(u\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)\right)\end{aligned}\tag{5}\)
其中 \(g\) 表示高斯核,\(u\) 表示两个点的欧氏距离。当然在输入层是坐标之间的欧氏距离,后面的层级中,这个函数表示的是两个点特征向量的欧氏距离。
第四种:只关注局部特征形式,输入仅为点和周围点的差。其公式如下:
\(\begin{aligned}h_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)=h_{\Theta}\left(\mathbf{x}_{j}-\mathbf{x}_{i}\right)\end{aligned}\tag{6}\)
第五种:同时关注全局特征和局部特征,这也是本文中的主要形式:
\(\begin{aligned}h_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)=\overline{h}_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}-\mathbf{x}_{i}\right)\end{aligned}\tag{7}\)
在本文中我们使用:
\(\begin{aligned}e_{i j m}^{\prime}=\operatorname{ReLU}\left(\boldsymbol{\theta}_{m} \cdot\left(\mathbf{x}_{j}-\mathbf{x}_{i}\right)+\boldsymbol{\phi}_{m} \cdot \mathbf{x}_{i}\right)\end{aligned}\tag{8}\)
该项可以用 shared MLP 表示,最后使用 max 进行特征聚合:
\(\begin{aligned}x_{i m}^{\prime}=\max _{j :(i, j) \in \mathcal{E}} e_{i j m}^{\prime}\end{aligned}\tag{9}\)
全部超参数集合为: \(\Theta=\left(\theta_{1}, \ldots, \theta_{M}, \phi_{1}, \ldots, \phi_{M}\right)\)
4.2 EdgeConv 实现
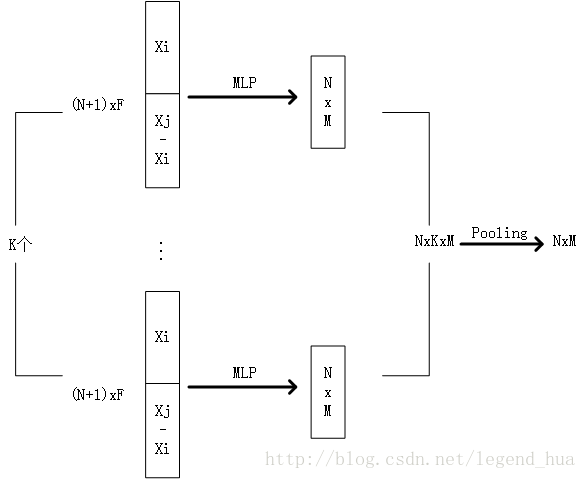
输入为NxF的张量,其中包括原数据Xi和与其附近的K个点。首先原数据的每个点和附件的K个点,通过MLP生成K个NxM特征,即NxKxM,最后通过一个pooling操作输出NxM特征。
看它的代码更清晰:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
#!/usr/bin/env python # -*- coding: utf-8 -*- """ @Author: Yue Wang @Contact: yuewangx@mit.edu @File: model.py @Time: 2018/10/13 6:35 PM """ import os import sys import copy import math import numpy as np import torch import torch.nn as nn import torch.nn.functional as F def knn(x, k): inner = -2*torch.matmul(x.transpose(2, 1), x) xx = torch.sum(x**2, dim=1, keepdim=True) pairwise_distance = -xx - inner - xx.transpose(2, 1) idx = pairwise_distance.topk(k=k, dim=-1)[1] # (batch_size, num_points, k) return idx def get_graph_feature(x, k=20, idx=None): batch_size = x.size(0) num_points = x.size(2) x = x.view(batch_size, -1, num_points) if idx is None: idx = knn(x, k=k) # (batch_size, num_points, k) device = torch.device('cuda') idx_base = torch.arange(0, batch_size, device=device).view(-1, 1, 1)*num_points idx = idx + idx_base idx = idx.view(-1) _, num_dims, _ = x.size() x = x.transpose(2, 1).contiguous() # (batch_size, num_points, num_dims) -> (batch_size*num_points, num_dims) # batch_size * num_points * k + range(0, batch_size*num_points) feature = x.view(batch_size*num_points, -1)[idx, :] feature = feature.view(batch_size, num_points, k, num_dims) x = x.view(batch_size, num_points, 1, num_dims).repeat(1, 1, k, 1) feature = torch.cat((feature-x, x), dim=3).permute(0, 3, 1, 2) return feature class DGCNN(nn.Module): def __init__(self, args, output_channels=40): super(DGCNN, self).__init__() self.args = args self.k = args.k self.bn1 = nn.BatchNorm2d(64) self.bn2 = nn.BatchNorm2d(64) self.bn3 = nn.BatchNorm2d(128) self.bn4 = nn.BatchNorm2d(256) self.bn5 = nn.BatchNorm1d(args.emb_dims) self.conv1 = nn.Sequential(nn.Conv2d(6, 64, kernel_size=1, bias=False), self.bn1, nn.LeakyReLU(negative_slope=0.2)) self.conv2 = nn.Sequential(nn.Conv2d(64*2, 64, kernel_size=1, bias=False), self.bn2, nn.LeakyReLU(negative_slope=0.2)) self.conv3 = nn.Sequential(nn.Conv2d(64*2, 128, kernel_size=1, bias=False), self.bn3, nn.LeakyReLU(negative_slope=0.2)) self.conv4 = nn.Sequential(nn.Conv2d(128*2, 256, kernel_size=1, bias=False), self.bn4, nn.LeakyReLU(negative_slope=0.2)) self.conv5 = nn.Sequential(nn.Conv1d(512, args.emb_dims, kernel_size=1, bias=False), self.bn5, nn.LeakyReLU(negative_slope=0.2)) self.linear1 = nn.Linear(args.emb_dims*2, 512, bias=False) self.bn6 = nn.BatchNorm1d(512) self.dp1 = nn.Dropout(p=args.dropout) self.linear2 = nn.Linear(512, 256) self.bn7 = nn.BatchNorm1d(256) self.dp2 = nn.Dropout(p=args.dropout) self.linear3 = nn.Linear(256, output_channels) def forward(self, x): batch_size = x.size(0) x = get_graph_feature(x, k=self.k) x = self.conv1(x) x1 = x.max(dim=-1, keepdim=False)[0] x = get_graph_feature(x1, k=self.k) x = self.conv2(x) x2 = x.max(dim=-1, keepdim=False)[0] x = get_graph_feature(x2, k=self.k) x = self.conv3(x) x3 = x.max(dim=-1, keepdim=False)[0] x = get_graph_feature(x3, k=self.k) x = self.conv4(x) x4 = x.max(dim=-1, keepdim=False)[0] x = torch.cat((x1, x2, x3, x4), dim=1) x = self.conv5(x) x1 = F.adaptive_max_pool1d(x, 1).view(batch_size, -1) x2 = F.adaptive_avg_pool1d(x, 1).view(batch_size, -1) x = torch.cat((x1, x2), 1) x = F.leaky_relu(self.bn6(self.linear1(x)), negative_slope=0.2) x = self.dp1(x) x = F.leaky_relu(self.bn7(self.linear2(x)), negative_slope=0.2) x = self.dp2(x) x = self.linear3(x) return x |
其中的:
|
1 2 3 |
x = get_graph_feature(x1, k=self.k) x = self.conv2(x) x2 = x.max(dim=-1, keepdim=False)[0] |
就是上面所说的 EdgeConv 部分。
3 动态图更新
实验表明,每次更新后重新计算每层点和周围的最近邻会取得更好的性能,这一动态图称为 Dynamic Graph CNN (DGCNN)。它的思想如下:
每一层都会得到一个不同的动态图,其中第 l 层动态图表示为:\(\mathcal{G}^{(l)}=\left(\mathcal{V}^{(l)}, \mathcal{E}^{(l)}\right)\)
每一层边缘 \(\left(i, j_{i 1}\right), \ldots,\left(i, j_{i k_{l}}\right)\) 表示 \(\mathbf{x}_{i}^{(l)}\) 周围 \(k_l\) 个最近邻点表示为 \(\mathbf{x}_{j_{i 1}}^{(l)}, \ldots, x_{j_{i k_{l}}}^{(l)}\)。每次更新后重新计算每层点和周围的最近邻重新得到边缘特征。
更新公式如下:
\(\begin{aligned}x^{l+1}=\square_{j :(i, j) \in \epsilon^{t}} h_{\theta}^{l}\left(x_{i}^{l}, x_{j}^{l}\right)\end{aligned}\tag{10}\)
相比一个普通的 CNN 操作,我们的动态图同时学习如何构建图结构本身,而不是仅仅把网络变成一个固定的参数
4 特性
排列不变性
对于点云来说,点的排列顺序不应该影响最终的结果,考虑到我们的每一层特征聚合公式:
\(\begin{aligned}\mathbf{x}_{i}^{\prime}=\max _{j :(i, j) \in \mathcal{E}} h_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)\end{aligned}\tag{11}\)
在我们的网络中,由于每一层 global max pooling 的存在,使得排列不变性可以获得(这一点类似于 PointNet)。
平移不变性(部分)
假设我们将之前的公式中每个点云位置 x 加上平移 T ,那么会得到如下结果:
\(\begin{aligned} e_{i j m}^{\prime} &=\theta_{m} \cdot\left(\mathbf{x}_{j}+T-\left(\mathbf{x}_{i}+T\right)\right)+\boldsymbol{\phi}_{m} \cdot\left(\mathbf{x}_{i}+T\right) \\ &=\boldsymbol{\theta}_{m} \cdot\left(\mathbf{x}_{j}-\mathbf{x}_{i}\right)+\boldsymbol{\phi}_{m} \cdot\left(\mathbf{x}_{i}+T\right) \end{aligned}\tag{12}\)
假如我们只考虑局部特征 \(\mathbf{x}_{j}-\mathbf{x}_{i}\),也就是令 \(\phi_{m}=0\),则上市满足平移不变性。
5 与其他方法对比
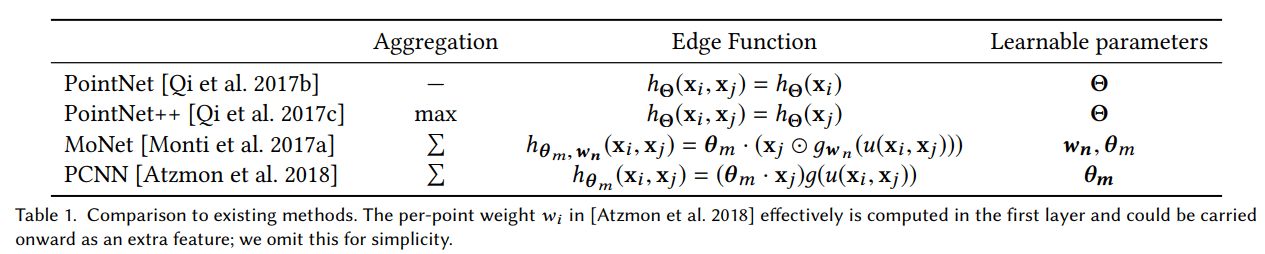
在作者的分析中,将几种常见的点云网络进行的对比(分为两类:PointNet 系列:PointNet、PointNet++;Graph CNN 系列:MoNet、PCNN),并且说明其实他们可以看作是 EdgeConv 模型的特例(只是边缘函数 、聚合函数 □ 定义的不同),作者给出了这样一个表格:
6 实验结果
这部分建议看原文,作者做了非常丰富和详尽的实验。
个人小结
这篇文章的从建模到设计到数学分析非常到位,阅读起来很有价值,非常像传统方法中的一篇 Generalized-ICP ,将其他的方法建模到自己的框架里面,这样从理论上解释了为什么自己的方法会比其他方法更好。我觉得这是这篇文章最大的亮点。
参考文献
- Dynamic Graph CNN for Learning on Point Clouds, Wang, Yue and Sun, Yongbin and Liu, Ziwei and Sarma, Sanjay E. and Bronstein, Michael M. and Solomon, Justin M., 2019
- https://blog.csdn.net/legend_hua/article/details/79175315
- https://blog.csdn.net/hongbin_xu/article/details/85258278
相关材料
原文 PDF
